mechanical design
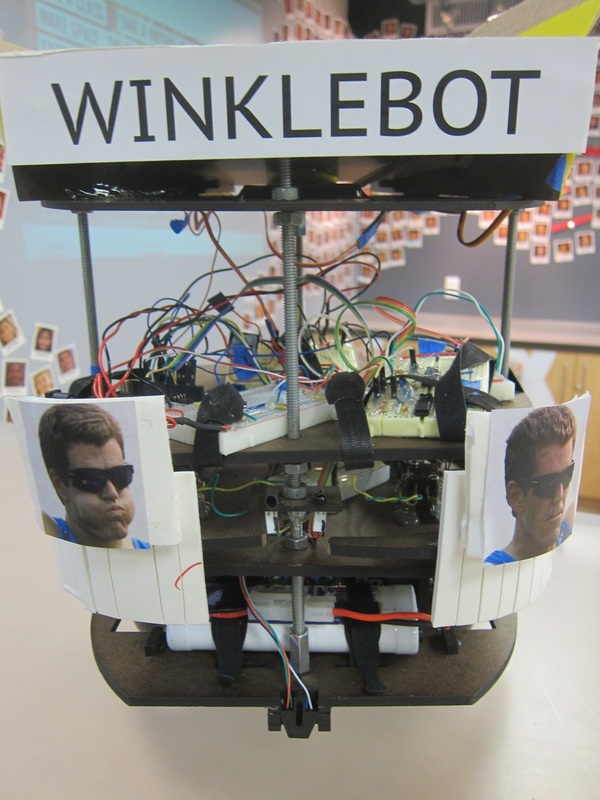
We designed WinkleBot with a few goals in mind: simplicity, reliability and repairability. WinkleBot is constructed from laser cut one-quarter-inch and one-eighth-inch Duron, quarter inch threaded rods, quarter inch bolts, nylon and stainless steel washers, and hot and wood glue. The bot is comprised of four levels:
- Motor Level - accommodates 2 motors, the LM298 motor driver and 2 batteries
- Bumper & Beacon Level - 4 bumpers, 4 microswitches and 2 beacon sensors
- Controller Level - 2 beacon circuits, the bumper circuit, the power regulator and the Arduino micro controller
- Dumper Level - supports the dumping mechanism and servo motor
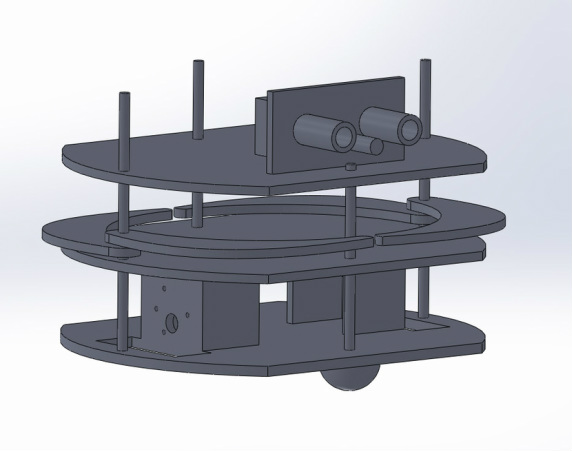
A view of our general layout without the dumping mechanism.
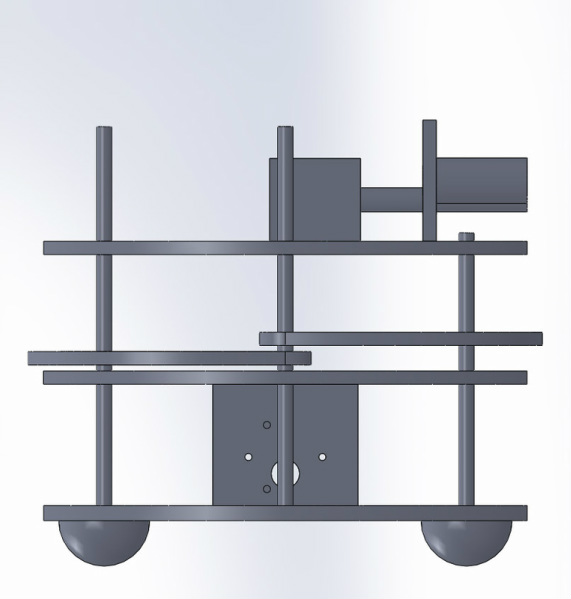
A side view of the different levels of WinleBot.