integration
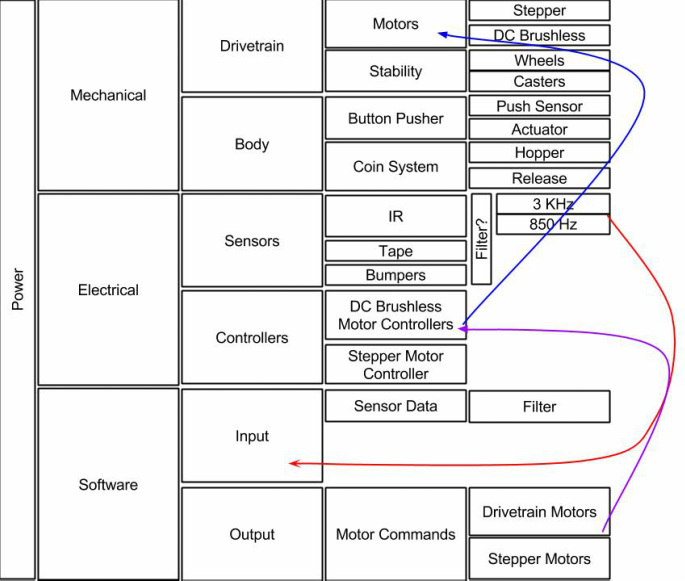
Block Diagram
We initially built and tested each component separately, finalizing the circuits and writing test code to confirm that each subsystem was performing as we intended. We worked on each subsystem in parallel, and fabricated the bot body simultaneously, which was a good use of our time and resources. However a mistake that the team made was we waited until all of the subsystems were complete before attempting to combine them all at once. This was problematic for two reasons - first it did not leave much time between building the bot and the checkoff deadline, and second it made troubleshooting problems more difficult because there were many possible variables at play.
A major challenge was integrating the sensor feedback into the desired motor behavior and navigation. Our motors were slightly unequal so the left side of our bot would travel faster than the right, resulting in a slight turn. We tried to adjust the power to each motor to compensate for this inequality, and we also added a brief motor reverse to make our braking more precise but despite these efforts the bot would often stop a little out of alignment with the beacon it just sensed, and would drive a little off course and miss the server or exchange completely. It was difficult to determine if the issue was with the precision of the sensors, or the uneven behavior of the motors. Coming into the project we knew that it was important to build the driving base of the bot as quickly as possible, because of advice from our coach and previous team who had faced similar problems. We succeeded in building the base fairly early but did not rigorously test it to perfect straight line driving, braking, and turning. Instead we focused our attention on completing the other subsystems for full integration.
A major challenge was integrating the sensor feedback into the desired motor behavior and navigation. Our motors were slightly unequal so the left side of our bot would travel faster than the right, resulting in a slight turn. We tried to adjust the power to each motor to compensate for this inequality, and we also added a brief motor reverse to make our braking more precise but despite these efforts the bot would often stop a little out of alignment with the beacon it just sensed, and would drive a little off course and miss the server or exchange completely. It was difficult to determine if the issue was with the precision of the sensors, or the uneven behavior of the motors. Coming into the project we knew that it was important to build the driving base of the bot as quickly as possible, because of advice from our coach and previous team who had faced similar problems. We succeeded in building the base fairly early but did not rigorously test it to perfect straight line driving, braking, and turning. Instead we focused our attention on completing the other subsystems for full integration.
